

(source links: http://info.museumstoreassociation.org, http://binaryapi.ap.org)
Hopefully, the simple and preliminary 'operations research (O.R)' analysis in this post can help make the experience a little less stressful and maybe even let us enjoy a bit of retail therapy that we can't get online. The shopping optimization problem addressed here is simple one, albeit with a twist. This post was triggered by an observation made after recent shopping expeditions to a nearby Costco outlet.
We have a long shopping list of L line-items (i) of various quantities N(i) that we have to pick up in a store. How should we optimally reorder our shopping list to reflect the sequence in which we pick up these items?
Version 1
The simple version aims to minimize total shopping time. For example, we can formulate this as an instance of the so-called traveling salesman problem (TSP) that finds the shortest sequence that starts at the entrance, visits each of the L 'cities' once, then the checkout counter, and ends at the store exit (entrance). A google search shows this 2009 research paper by researchers at UPenn, which shares the technical details and interesting results for this version.
To simplify our problem, we assume that the topology of the store is prior knowledge, and we can roughly pre-assign items in the same aisle to the same 'city'. The resultant problem is to find the order of visits to the aisles of interest to us. If the aisles are neatly arranged as node intersections in a rectangular grid, then we simply have to find the shortest rectilinear "Manhattan" distance tour in this grid. Depending on the type of the store, the store-layout itself may be optimized by the retailer based on the observed foot-traffic and 'heat-map' data. For example, it may be designed to retain the customer in the system to increase chances of purchase (exploratory tour, store selling expensive luxury/fashion products), or quickly out of the system (routine tour, obligatory products like groceries), or based on some other goal. Store space and layout problems are known to be commercially useful optimization problems in the retail industry.
Picture linked from an iTunesApp (Concorde) page of Prof. Bill Cook that solves TSPs :)

Version 2
Let us additionally assume that product attributes have an impact on our order. Suppose one or more items in our list is located in the frozen section at a grocery store, then we may prefer to get there at the end of our tour. Luckily, many stores appear to anticipate this (?), and locate this section towards the end of the store. Thus if 'maximum freshness' or 'minimum damage' is an additional consideration, this may alter the TSP route and the final ordering of items in our shopping list.
Version 3
This was the problem that was of immediate interest to me today. Costco sells stuff in bulk, so the items tend to be heavy, and considerable energy is expended moving the cart through the store. At the risk of mangling undergrad physics, let us proceed with our analysis...
Let μ be the (constant) coefficient of rolling friction between the wheels of the shopping cart and the store-floor. Then the work required to move mass m through distance d = force x displacement =μmgd, where g is the (constant) acceleration due to gravity. Thus a squeaky-wheeled cart will make us work extra hard. Speed of shopping is a consideration if we want to keep track of power (force x velocity). Covering the same tour length in half the time requires twice the power, i.e. the rate at which our body expends stored energy.
Carry versus Cart (reinventing the wheel)
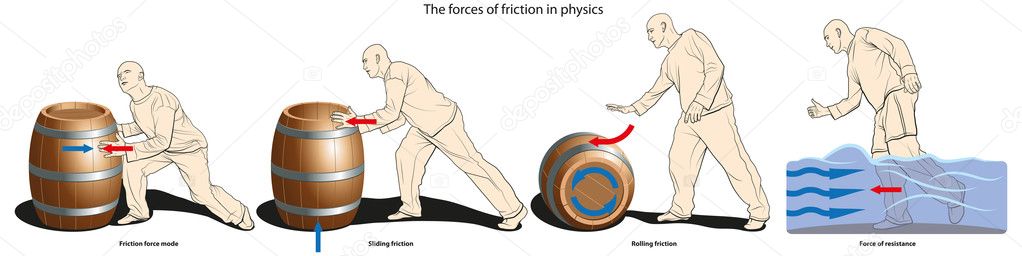
If we had zero rolling friction, technically the only work involved is in lifting items and putting them in our cart. We can assume that this work is independent of our order of visit and is a fixed quantity. On the other hand, if we are not working with a wheeled-cart, but carry our stuff in a market-basket or shopping bags, then we have to raise the potential energy of the items to height 'h' (mgh) all the way until checkout, and also overcome the sliding friction between our shoes and the floor, which would probably be higher than the rolling friction, as illustrated below.
Why is a shopping experience increasingly stressful over time?
As we add items to our cart, the work done per unit time (power) required increases. In the continuous case, this problem closely resembles our 'optimal snow shoveling problem' analyzed during a February snow storm. The accumulated objective function cost there increases as the square of the distance. Here, we look at the discrete situation. When we visit city 'i' to pick up N(i) items each having mass m(i), we instantaneously add mass N(i) * m(i) that we have to lug around until checkout. After picking up k-1 items, my total work done will approximately be:
μg * sum (i = 0,... k-1) W(i) * d(i, i+1), where i = 0, represents the store entrance, m(0) represents the mass of an empty shopping cart, and
W(i) = sum(j = 0, .., i) N(j) * m(j) = total mass carried from city i to i+1.
In other words, the 'cost' accrued while traversing any pair of cities also depends on the items we picked up earlier, i.e., it is no longer memory-less and varies depending on the cities visited earlier.
Result: our shopping gets increasingly more tiring over time
If one of the items in our shopping list involve a heavy item, then our optimal solution may no longer be the shortest time tour. We now have to solve a minimum-effort TSP. Operations Researchers have also looked at methods for solving a path-dependent TSP in the past. A simple heuristic approach would be to break the trip into two tours. The earliest items stay with us the longest, so we first find the optimal sequence through the light items, followed by the shortest tour through the heavy items. We also have to organize the shopping cart carefully enough to ensure that our light items do not get squished by heavy products, and our ice-cream doesn't melt. I'm sure there are better algorithms than the one provided here.
Recommendation
If we want to burn calories while shopping then a good way to do that, based on our previous discussion is (a) carry our items, (b) pick up the heaviest items first, and (c) take the longest route to maximize energy expenditure (d) walk briskly. This health-and-fitness article provides ten tips for exercising that includes these ideas. For the rest of us who are looking to minimize effort, we simply do the opposite:
We sort our shopping list items in decreasing order of expected weight (frozen stuff goes to the bottom too), while also ensuring that the aisles of adjacent items in the list are close to each other, and we are not revisiting aisles or zig-zagging much. Some swapping may be required to find improved sequences. Many of us have probably evolved into efficient shoppers over time, and naturally take these steps and more, but if there an opportunity for improvement that the 'science of better' can uncover for us to make our shopping less stressful, let's take it.
Happy Holidays!
Update 1: December 17, 2013
IBM Smarter Retail article says:
"..... Most recently, Lowe’s has offered the customer a product location functionality that is integrated with their wish list. According to Ronnie Damron, .....Whether customers are browsing the store for ideas or searching for a specific item in a hurry, we think the Product Locator feature will simplify the shopping process, creating a better experience that encourages customers to come back again and again.”



{kind=link}